ScanNav est un logiciel de navigation 100% français, créé par Marc Lombard (homonyme du célèbre architecte naval) en 1997 pour ses besoins personnels. La commercialisation a ensuite démarré avec une première vente fin 1999, suivi rapidement par d'autres utilisateurs, et le bouche à oreille des utilisateurs satisfaits a fait le reste.
• ScanNav ne vous demandera pas beaucoup de ressources. Toute configuration PC minimaliste du commerce fonctionnant sous Windows suffira. Il n'y a aucun prérequis comme des cartes graphiques ou autres...
• Il fonctionne
· Sur ordinateurs PC et/ou tablettes
· Dès les configurations d’entrée de gamme (ou même anciennes) :
- Windows, de XP SP3 jusqu’aux dernières versions de Windows ( 11 à ce jour)
- Linux, ChromeOS et MacOS (via Wine)
- Une version allégée "Compagnon" est également disponible sur plateformes Androïd. Elle est fournie gratuitement pour toutes personnes ayant déjà ScanNav avec un pack de cartes Raster SnMap
• ScanNav est évolutif. Vous pouvez dans un premier temps acquérir le logiciel de base, puis par la suite compléter avec les autres modules proposés. Ayant le souci d’améliorer constamment son logiciel, ScanNav propose régulièrement des mises à jour et est à l'écoute de ses utilisateurs.
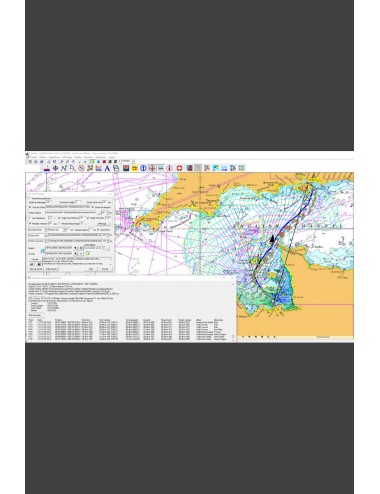
• Le module de base vous permettra de préparer au mieux votre navigation afin de naviguer avec un maximum de sécurité.
· Tracés de route, waypoints, alignements, zones de mouillages ou de danger….
· Intégration de bases de données et de guides
· Calques d’objets
· Différents types de cartographie possibles (voir ci-dessous), et superposition de couches satellites via la fonction des calques WEB
· Hauteurs d’eau (couverture mondiale)
· Enregistrement de la trace, et des données de navigation, interfaçage des instruments
· Alarmes, répétiteurs, homme à la mer, points instantanés…
· Analyse des traces, Replay, ... et bien plus encore
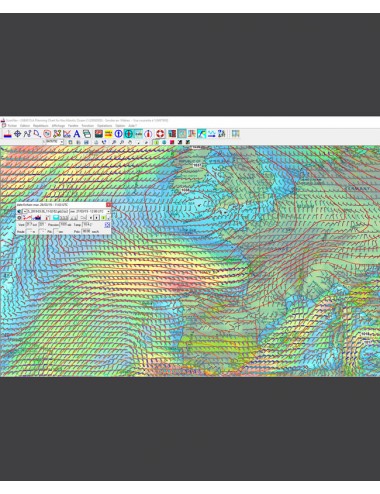
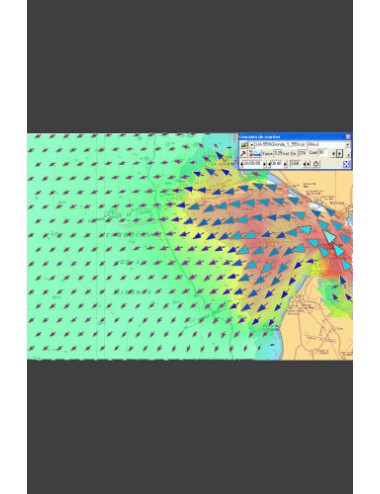
• Les options incluent la Météo, les Courants, le Routage, et l'AIS. Vous pouvez rajouter ces options par la suite si vous ne les avez pas souscrites dès le départ.
• Une de ses préoccupations majeures a toujours été d’utiliser des cartographies de qualité.
Au tout début, ScanNav était prévu pour naviguer avec ses propres cartes scannées. Il a ensuite rapidement intégré les cartes Scannées de la société Maptech, mais il s'avère que cette dernière ne les mettait pas à jour. ScanNav a donc passé un contrat avec le SHOM, pour créer des cartes directement depuis les films d'impression du SHOM, avec mises à jour 2 fois par an avec le dernier GAN (Groupe d'avis aux navigateurs, ou NtM en Anglais). Ce même principe a ensuite été étendu avec l'UKHO, ainsi que d'autres services hydrographiques.
ScanNav a également été un acteur important quant à l’accessibilité des cartes ENC officielles aux plaisanciers, celles-ci étant auparavant réservées au marché professionnel SOLAS. ScanNav fourni celles-ci aussi bien aux Professionnels qu'aux plaisanciers depuis 2006.
Une nouvelle offre Vector SnMap dérivée des ENCs a ensuite été créée pour répondre au besoin des plaisanciers avec une offre moins dispendieuse que les ENCs. Celle-ci est constituée des mêmes cartes que les ENCs, mais avec un rythme de mises à jour moins fréquent que les ENCs (entre 2 à 4 mises à jour par an, contre toutes les semaines pour les ENCs), et n'est pas soumis au contrôle final des services hydrographiques. Elle n'est donc pas homologué pour le marché professionnel SOLAS, et est réservée à la plaisance.
ScanNav supporte également la cartographie Navionics sur cartes SD ou CF. Si vous êtes déjà équipé de cartes Navionics pour votre traceur, vous pouvez les installer dans ScanNav puis les remettre dans votre traceur. Vous n'avez ainsi pas besoin d'acheter un nouveau jeu de cartes.
Il s’agit des mêmes cartes originelles que les ENC officielles mais sans le contrôle du packaging final par les services hydrographiques, ce qui permet d’offrir cette cartographie à un prix abordable pour la plaisance.